Praxisbeispiel - Reinforcement Learning Hands-on: Roboter im Raum¶
In diesem Notebook wird ein einfacher Q‑Learning-Algorithmus implementiert, mit dem ein Roboter (Agent) lernt, einen Ausgang in einem 2D-Gitter zu finden. Die Visualisierung ermöglicht es, den Entscheidungsprozess und die Pfadfindung Schritt für Schritt nachzuvollziehen.
[1]:
import numpy as np
import matplotlib.pyplot as plt
import time
from IPython.display import clear_output
# Für Inline-Plots in Jupyter
%matplotlib inline
Definition der Umgebung: GridWorld¶
Die Umgebung wird als 2D-Gitter modelliert, in dem der Roboter sich bewegen kann. Der Ausgang (Goal) wird als Zielzelle definiert.
[2]:
class GridWorld:
"""
Ein einfaches 2D-Grid, worin ein Agent von einer Start- zu einer Zielposition navigieren soll.
Attribute:
width (int): Breite des Gitters (Anzahl Spalten).
height (int): Höhe des Gitters (Anzahl Zeilen).
start (tuple): Startposition des Agenten als (x, y).
goal (tuple): Zielposition (Ausgang) als (x, y).
agent_pos (tuple): Aktuelle Position des Agenten als (x, y).
"""
def __init__(self, width, height, start, goal):
"""
Initialisiert die Gitterwelt mit den angegebenen Dimensionen und Positionen.
Args:
width (int): Breite des Gitters.
height (int): Höhe des Gitters.
start (tuple): Startposition des Agenten als (x, y).
goal (tuple): Zielposition (Ausgang) als (x, y).
"""
self.width = width
self.height = height
self.start = start
self.goal = goal
self.reset()
def reset(self):
"""
Setzt die Agentenposition auf die Startposition zurück (nach jeder Episode notwendig).
Returns:
tuple: Die aktuelle (zurückgesetzte) Position des Agenten (x, y).
"""
self.agent_pos = self.start
return self.agent_pos
def step(self, action):
"""
Führt einen Schritt in der Umgebung basierend auf der gegebenen Aktion aus.
Aktionen werden wie folgt kodiert:
0 = oben
1 = rechts
2 = unten
3 = links
Args:
action (int): Index der gewählten Aktion (0 bis 3).
Returns:
tuple: Nächste Agentenposition (x, y) nach dem Schritt.
float: Belohnung (Reward) für diesen Schritt.
bool: True, falls das Ziel erreicht ist; False sonst.
"""
x, y = self.agent_pos
if action == 0: # nach oben
y = max(y - 1, 0)
elif action == 1: # nach rechts
x = min(x + 1, self.width - 1)
elif action == 2: # nach unten
y = min(y + 1, self.height - 1)
elif action == 3: # nach links
x = max(x - 1, 0)
self.agent_pos = (x, y)
reward = -1 # Schrittkosten
done = False
if self.agent_pos == self.goal:
reward = 100
done = True
return self.agent_pos, reward, done
def render(self):
"""
Visualisiert die aktuelle Umgebung mit Hilfe von Matplotlib.
- Zielzelle wird mit Grauton 0.5 dargestellt.
- Agentenposition wird mit Weiß (1.0) dargestellt.
"""
grid = np.zeros((self.height, self.width))
# Zielzelle markieren
grid[self.goal[1], self.goal[0]] = 0.5
# Agentenposition markieren
grid[self.agent_pos[1], self.agent_pos[0]] = 1
plt.imshow(grid, cmap='gray_r')
plt.xticks(range(self.width))
plt.yticks(range(self.height))
plt.show()
plt.close()
Q‑Learning Parameter und Initialisierung¶
Wir definieren die Lernparameter sowie die Q‑Tabelle. Die Aktionen werden wie folgt kodiert:
0: oben
1: rechts
2: unten
3: links
[3]:
# Lernparameter
alpha = 0.1 # Lernrate
gamma = 0.9 # Diskontfaktor
epsilon = 0.2 # Explorationsrate
episodes = 5 # Episoden
# Erstelle die Umgebung
env = GridWorld(4, 4, start=(0, 0), goal=(2, 3))
# Q‑Tabelle initialisieren: Dimensionen (Breite, Höhe, Anzahl Aktionen)
Q = np.zeros((env.width, env.height, 4))
def choose_action(state, Q, eps):
"""
Wählt eine Aktion nach einer einfachen epsilon-greedy-Strategie (deterministische Variante).
Diese Funktion prüft, ob eine Zufallszahl < epsilon ist:
- Falls ja, wird eine zufällige Aktion (0-3) gewählt (exploration).
- Falls nein, wird die Aktion mit dem höchsten Q-Wert gewählt (exploitation).
Args:
state (tuple): Aktueller Zustand des Agenten als (x, y).
Q (numpy.ndarray): Q-Tabelle der Form (width, height, 4).
epsilon (float): Wahrscheinlichkeit für zufällige Exploration (Wert zwischen 0 und 1).
Returns:
int: Index der gewählten Aktion (0 bis 3).
"""
if np.random.rand() < eps:
return np.random.randint(4)
else:
x, y = state
return np.argmax(Q[x, y, :])
Training mit schrittweisr Grid-Visualisierung¶
In jeder Episode wird der Agent von der Startposition aus agieren, bis er den Ausgang erreicht. Nach jedem Schritt wird die aktuelle Position visualisiert.
[4]:
# Training mit schrittweiser Visualisierung
for ep in range(episodes):
state = env.reset()
done = False
step_count = 0
while not done:
# Aktion wählen
action = choose_action(state, Q, epsilon)
# Schritt in der Umgebung ausführen
next_state, reward, done = env.step(action)
# Q-Update
x, y = state
nx, ny = next_state
Q[x, y, action] += alpha * (reward + gamma * np.max(Q[nx, ny, :]) - Q[x, y, action])
# Zustand updaten
state = next_state
step_count += 1
# Visualisierung aktualisieren
clear_output(wait=True)
grid = np.zeros((env.height, env.width))
grid[env.goal[1], env.goal[0]] = 0.5 # Zielzelle
grid[env.agent_pos[1], env.agent_pos[0]] = 1 # Agentenposition
plt.imshow(grid, cmap='gray_r')
plt.title(f'Episode {ep+1}, Schritt {step_count}')
plt.xticks(range(env.width))
plt.yticks(range(env.height))
plt.show()
time.sleep(0.1)
Training, mit schrittweiser Grid-Visualisierung und simultanen Q-Table Wahrscheinlichkeiten für mögliche Aktionen¶
[5]:
# Action names for visualization (4 actions: 0: Up, 1: Right, 2: Down, 3: Left)
action_names = ["Up", "Right", "Down", "Left"]
def get_action_probabilities(state, Q, eps):
"""
Compute the epsilon-greedy probabilities for actions at the given state.
Each action gets a base probability of eps/4, and the best action (argmax of Q-values)
gets an additional probability mass of (1 - eps).
Args:
state (tuple): The current state as (x, y).
Q (np.ndarray): Q-table with shape (width, height, 4).
eps (float): Epsilon value (exploration rate).
Returns:
numpy.ndarray: A vector of probabilities for the 4 actions.
"""
x, y = state
q_vals = Q[x, y, :]
best_action = np.argmax(q_vals)
probs = np.ones(4) * (eps / 4.0)
probs[best_action] += (1.0 - eps)
return probs
# Training mit schrittweiser Visualisierung, inklusive Grid und der aktuellen Options-Wahrscheinlichkeiten und der gewählten Aktion
for ep in range(episodes):
state = env.reset()
done = False
step_count = 0
while not done:
clear_output(wait=True)
# Erstelle eine neue Figur für diesen Schritt
fig, ax = plt.subplots(figsize=(6, 4))
# Erstelle neues Grid-Display: 0 = leer, 0.5 = Ziel, 1 = Agent
grid = np.zeros((env.height, env.width))
grid[env.goal[1], env.goal[0]] = 0.5 # mark goal
grid[env.agent_pos[1], env.agent_pos[0]] = 1 # Agents aktuelle Position
# Plotte das Grid (Gitter)
ax.imshow(grid, cmap='gray_r', vmin=0, vmax=1)
ax.set_xticks(range(env.width))
ax.set_yticks(range(env.height))
ax.set_title(f"Episode {ep+1}, Step {step_count+1}")
# Berechne epsilon-Greedy- Aktions-Wahrscheinlichkeiten für den aktuellen Zustand
probs = get_action_probabilities(state, Q, epsilon)
# Wähle eine Aktion anhand der bestehenden Epsilon-Greedy-Funktion
action = choose_action(state, Q, epsilon)
# Zeige die berechneten Wahrscheinlichkeiten und die gewählte aktion nebem dem Grid
text_str = (
f"Action probabilities:\n"
f"Up: {probs[0]:.2f}\n"
f"Right: {probs[1]:.2f}\n"
f"Down: {probs[2]:.2f}\n"
f"Left: {probs[3]:.2f}\n\n"
f"Chosen action: {action} ({action_names[action]})"
)
# Text rechts vom Raster platzieren, ggf. Koordination anpassen
ax.text(env.width + 0.5, env.height/2, text_str, fontsize=10, va='center')
plt.tight_layout()
plt.show()
# Führe die Aktion durch und aktualisiere den Q-Wert
next_state, reward, done = env.step(action)
nx, ny = next_state
Q[state[0], state[1], action] += alpha * (reward + gamma * np.max(Q[nx, ny, :]) - Q[state[0], state[1], action])
state = next_state
step_count += 1
time.sleep(1) # Pause, damit der Schritt sichtbar ist
# End-of-eEpisode Message
clear_output(wait=True)
env.render()
print(f"Episode {ep+1} completed.")
time.sleep(1.0)
Episode 5 completed.
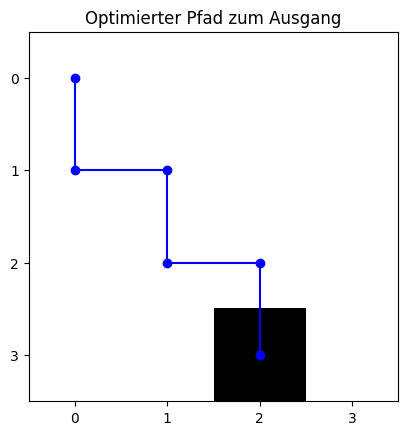
Trainiertes Modell: Darstellung des optimalen Pfads¶
Nach dem Training wird der Agent den erlernten (nahezu) optimalen Pfad zum Ausgang demonstrieren.
[25]:
# Reset und initialisiere Pfadspeicher
state = env.reset()
done = False
path = [state]
while not done and len(path) < 100:
x, y = state
action = np.argmax(Q[x, y, :])
state, _, done = env.step(action)
path.append(state)
# Visualisierung des gefundenen Pfads
grid = np.zeros((env.height, env.width))
grid[env.goal[1], env.goal[0]] = 0.5 # Zielzelle
plt.imshow(grid, cmap='gray_r')
x_coords = [pos[0] for pos in path]
y_coords = [pos[1] for pos in path]
plt.plot(x_coords, y_coords, marker='o', color='blue')
plt.title('Optimierter Pfad zum Ausgang')
plt.xticks(range(env.width))
plt.yticks(range(env.height))
plt.show()